Filters
Filter (H)
Linearlity: H(a x[n] + b y[n]) = a H(x[n]) + b H(y[n]) (This is because if two signals come together, the filtered signals have be same as sum of filtered signal for each signal.)
Time invariance: y[n] = H(x[n]) <=> H(x[n-n0]) = y[n-n0]
This is called LTI system (Linear time invariant)
Let Then
Convolution Properties
Linearity and time invariance
Commutative
Associative
Moving Average Filter
Impulse Response
first-order Recursive
Leaky-integrated factor:
When M is large, then lambda is almost 1 and y_M[n] approximately equal to y_{M-1}[n]
So, try the filter y[n] = lambda y[n-1] + (1-lambda) x[n]
Impulse response
The name of leaky integrator comes from the weight of previous summation (leaky) and replace of a new value.
Filter types according to impulse response
Finite Impulse Response (FIR)
impulse response has finite support.
Ex: Moving average filter.
Infinite Impulse Response (IIR)
impulse response has infinite support
Leaky integrator
Causal
impulse response is zero for n < 0
only past samples (with respect to the present ) are involved in the computation of each output sample.
Ex: Moving average
Noncausal
impulse response is nonzero for some (for all) n <0
can still be implemented in a offline fashion ( when all input data is available on storage e.g. in image processing).
Ex: Zero-centered Moving Average filter.
Stability
key concept: avoid "explosions" if the input is nice
e^{jw_0 n} to the filter
Properties
complex exponentials are eigensequences of LTI systems, i.e. linear filters cannot change the frequency of sinusoids.
DTFT of impulse response determines the frequency characteristics of a filter.
In general.
Examples
Moving Average
Leaky Integrator
In General,
Classify the filters according to magnitude response
Lowpass
Moving Average and Leaky Integrator
impulse response is infinite support, two-sided
cannot compute the output in a finite amount of time
decays slowly in time
The sinc-rect pair
Fact
the sinc is not absolutely summable
the ideal lowpass is not BIBO stable.
Highpass
Bandpass
Allpass
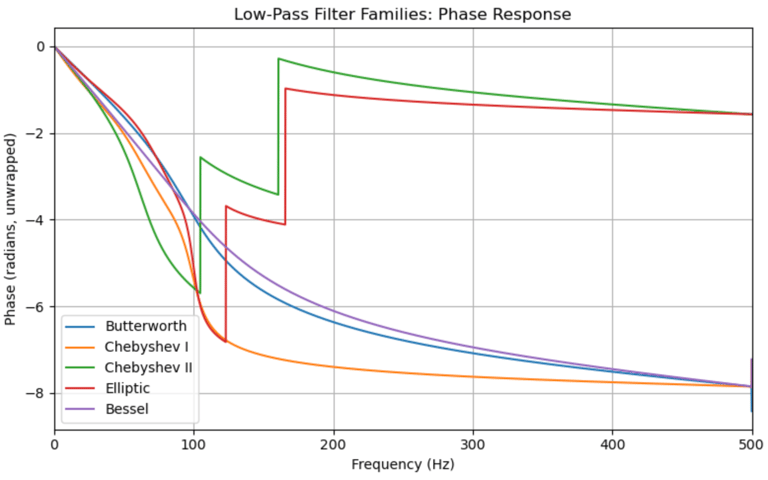
Filter types according to phase response
Linear phase
Nonlinear phase
Linear Analog Electric IIR Filters (in github)
Butterworth Filter : a type of signal filter designed to have the flattest possible frequency response in the passband — meaning it passes signals below a certain cutoff frequency without ripple and attenuates signals above that frequency smoothly.
Frequency response: a measure of how well a system, like a speaker or control system, handles a range of input frequencies. The quantitive measure of the magnitude and phase of the output as a function of input frequency.
Key properties:
Maximally flat magnitude response
No ripples in the passband or stopband. The gain decreases smoothly.Monotonic roll-off:
The transition from passband to stopband is smooth and gradual (slower than Chebyshev or elliptic filters).Phase response:
Non-linear, but smoother than some other IIR filters.
Order vs. roll-off:
The higher the order n, the steeper the transition near the cutoff frequency
Frequency Response
The magnitude response of an n-th order Butterworth lowpass filter is
where w = angular frequency, w_c = cut off frequency, n= order of filter.
In the python code,
b, a = signal.butter(order, cutoff / (fs/2), btype='low')b and a are the coefficients of the filter's transfer function:
This is a standard IIR difference equation form.
FIR difference equation form is
Butterworth filter can be used when we want to have smooth, flat response (general-purpose filtering). Most audio or sensor filtering (flat and smooth) can be used for butterworth filter.
Chebyshev filter: a type of analog or digital filter designed to have a steeper roll-off (transition from passband to stopband) than a Butterworth filter of the same order — but the trade-off is that it allows ripple (oscillation) in either the passband or the stopband, depending on the version.
Key properties
Faster roll-off, but with ripple (non-flatness)
Types
Chebyshev Type1: Passband ripple, flat stopband, most common for fast cutoff
Chebyshev Type2: Stopband ripple, flat passband, Used when passband flatness is important.
Frequency response
Magnitude response formaula (low-pass, Type 1):
where C_n = Chebyshev polynomial of order n. \epsilon = ripple factor (larger->more ripple, steeper roll-off, w_c = cutoff frequency)
Magnitude response formaula (low-pass, Type 2):
Application:
Audio processing: Steeper filtering with minimal delay (e.g., crossover networks)
Communication systems: Channel filtering where sharp cutoff is critical
Measurement systems: Where noise above a frequency must be strongly attenuated.
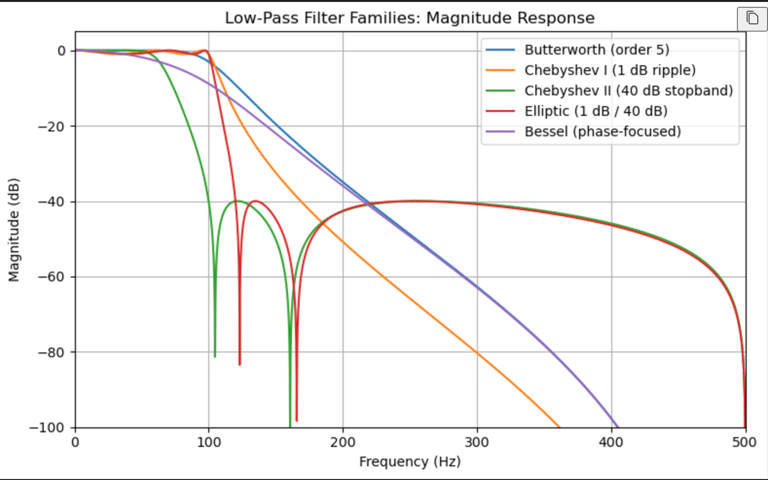
Elliptic Filter: the sharpest transition between passband and stopband for a given order. It allows ripple in both the passband and the stopband, but the steepest roll-off, the lowest order, and very strong selectivity between passband stopband.
Maginitude Response
where \epsilon = ripple factor (controls passband ripple), R_n(\xi, x) = elliptic rational function of order n, \xi = selectivity parameter (related to the stopband ripple), w_c= cutoff frequency.Application:
Sharpest frequency cutoff for a given order
tolerates ripple in both passband stopband
efficient filters with minimal computation cost (low order)
Digital communication systems (tight bandwidth requirements)
Anti-aliasing filters
Channel separation in multiband systems
Real-time DSP where filter order must be minimized.